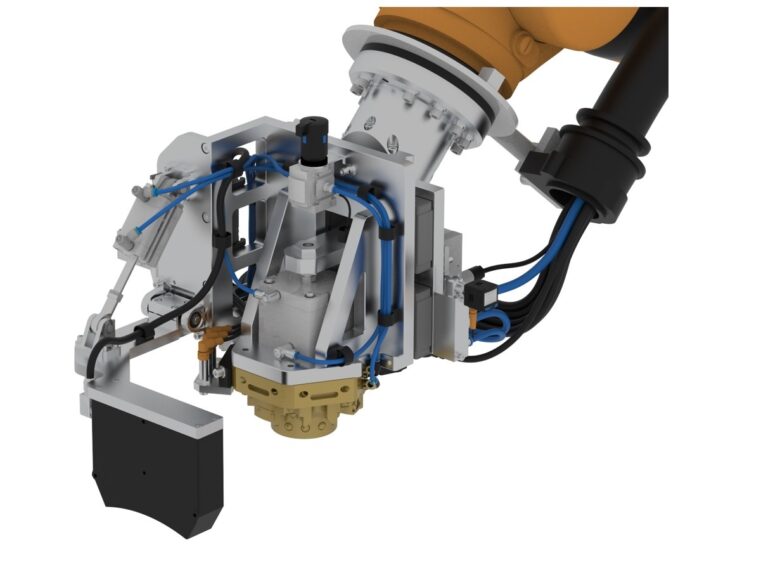
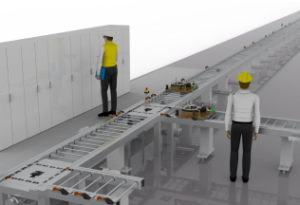
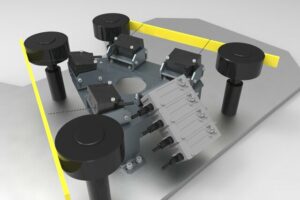
After marking the VIN number, it goes through the number with the cleaning brushes and cleans it with air pressure using a blowing nozzle. After cleaning, the robot moves with the camera over the embossed VIN number, captures the result of the embossing and the images with the embossed VIN number are stored in the archive.
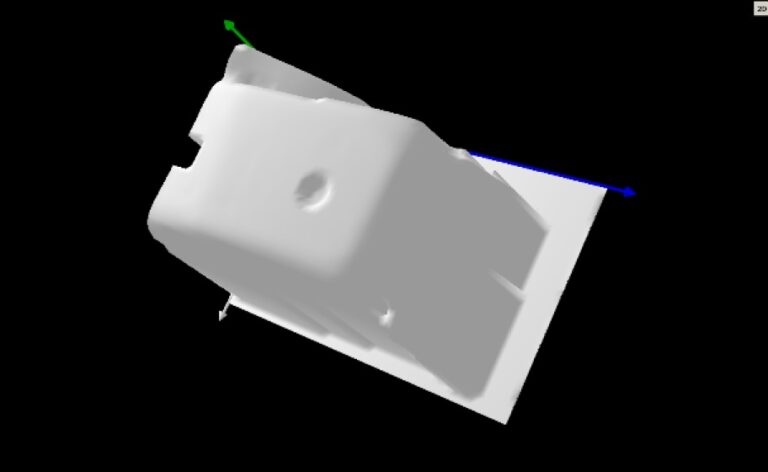
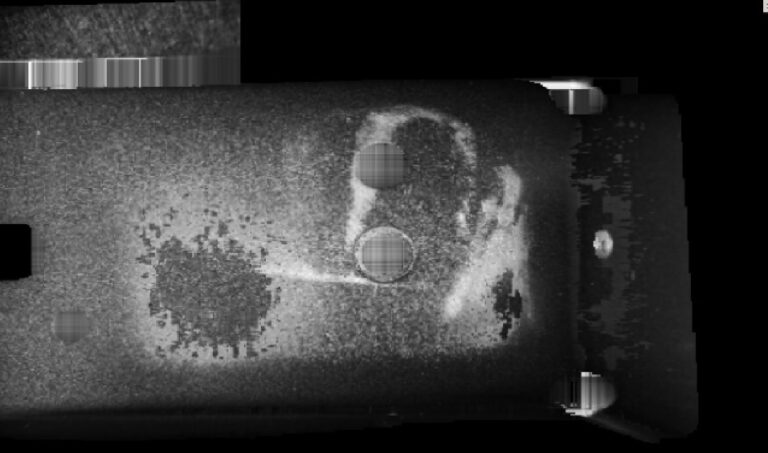
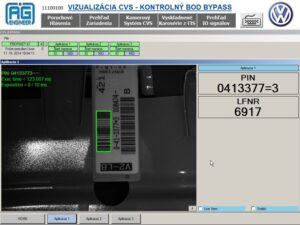
When marking the Audi Q8, the camera system performs two measurements before marking. It controls a large area on which the VIN number is marked and a small area – the bearing surface for the marking head. During shooting, the camera system in the Q8 body is not tilted by means of a pneumatic cylinder – this is not necessary, as the punching point is located on a beam under the seat. The camera is connected to a PC running the VisionAGE VIN H3 application.
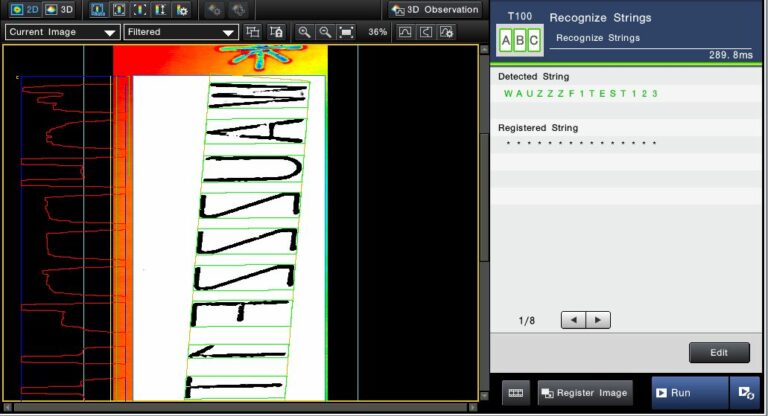
The application provides communication with the camera and evaluation of measurements. The main elements of the application are the display field, the line with status indicators and the panel with information about the body and the camera program.