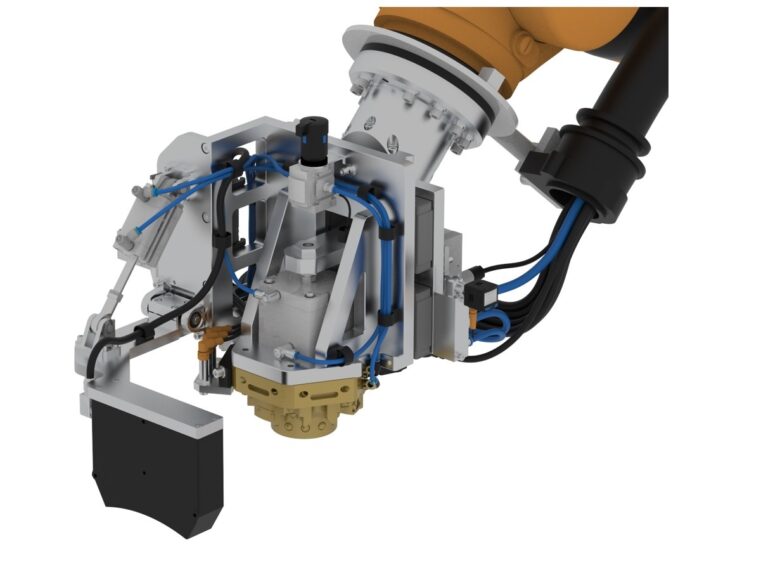
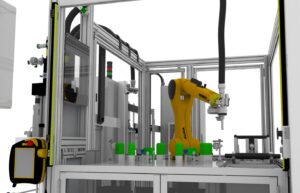
After opening the hood with a device designed for this purpose, the robot with a camera on the tilting arm moves under the front hood, where it performs the measurement. If the camera system evaluates that the area for marking the VIN number is OK, the robot continues to operate - it moves under the hood with the marking head and do the process of marking VIN number.